



As Europe aims to be a leader in the deployment of CCAM (Connected, Cooperative and Automated Mobility) services, PoDIUM has emerged as a key project dedicated to accelerating CCAM implementation by enhancing specific technologies in both the physical and digital part of the infrastructure. Launched in October 2022, the project has made significant progress and has achieved several key milestones.
PoDIUM’s goal is to contribute to the deployment of advanced and reliable CCAM services in Europe. To realise its vision, the project concentrates on key PDI (Physical and Digital Infrastructure) technologies, with a focus on multi-connectivity, interoperability, hybrid data management, software integrity, and data truthfulness. The project will evaluate different connectivity and cooperation enablers in three well-equipped Living Labs to support the integration of automated vehicles in the overall transport system. This is one of the main objectives of the CCAM Partnership, in which PoDIUM plays a pivotal role as one of its strategic projects.
Over the past year, the project partners have accomplished two important objectives that underpin the project’s technical development. First, the specifications of PoDIUM’s five use cases have been detailed and submitted as Deliverable D2.1 – Use Case Description and Specifications. The use cases, which will be demonstrated in the project’s Living Labs in Germany, Spain, and Italy, encompass urban, highway, and cross-border scenarios, each tailored to foster the development of CCAM services in Europe. To ensure that the systems deployed in the Living Labs align with the sector’s needs, various requirements were identified by the partners, such as specific technologies, infrastructure equipment, or the type of connectivity needed to perform the use case. The wide range of scenarios that the use cases will cover are also described in the deliverable. These include cooperative corridor management, user-centric traffic management with high-priority vehicles, real-time responsive traffic management, trusted cooperative perception, and risk management in a highway tunnel.
Another significant milestone achieved by the project consortium is the specification of the PoDIUM high-level platform architecture. The platform architecture will serve as a reference for the demonstration of the use cases to ensure the interoperability of the technologies, including networks and software components. The platform’s functionality and its potential to improve CCAM services will also be validated through the use cases.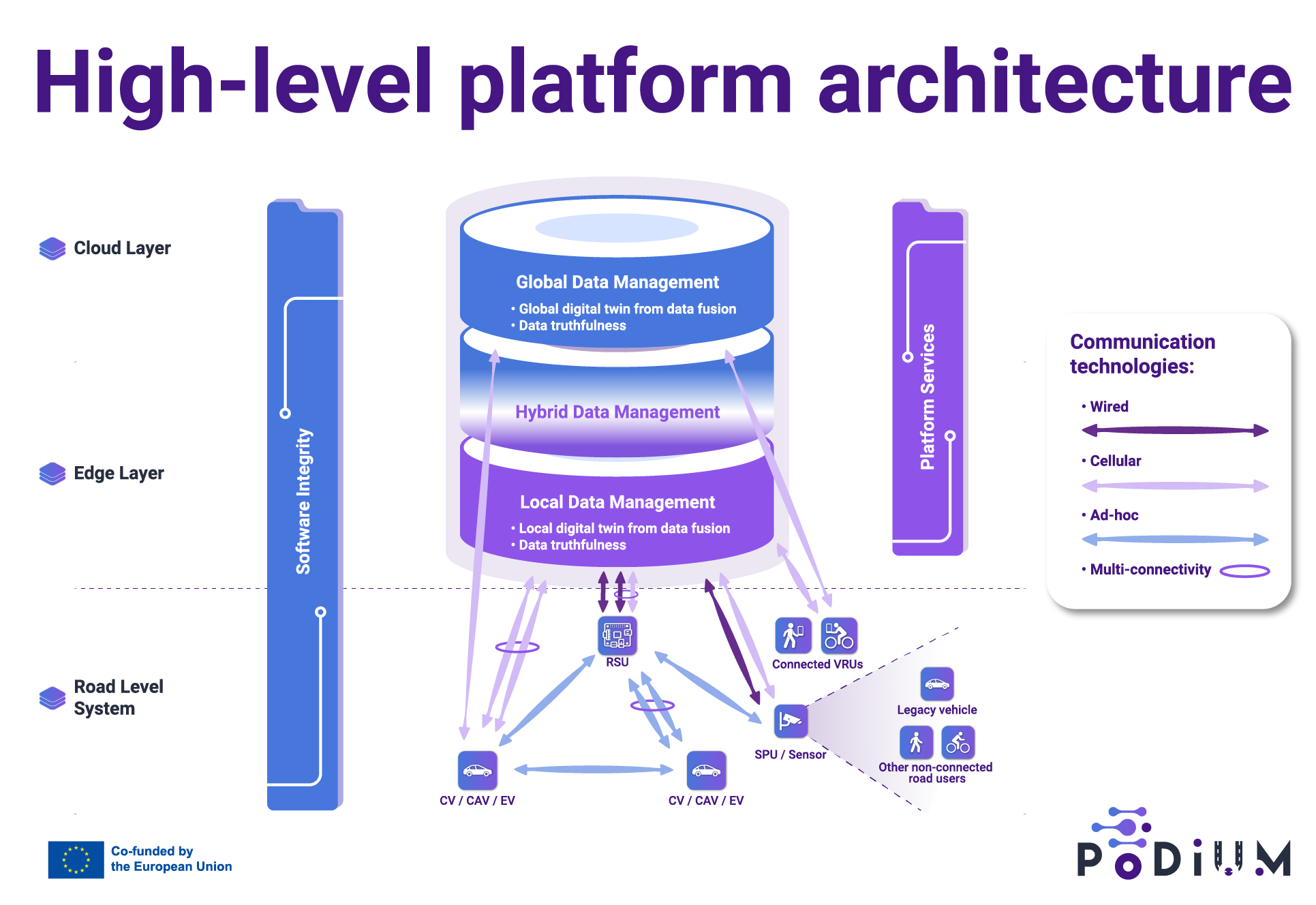 The PoDIUM platform architecture outlines the main enablers that will be developed and implemented by the project. The system features CCAM services operating on a central cloud and an edge layer. Road users, including vulnerable road users and emergency vehicles, can connect directly to the infrastructure or be detected by sensors equipped on other road users or by infrastructure sensors. To improve reliability and latency, multi-connectivity is ensured through wired, cellular, or ad hoc networks. The data from and for the edge and central layers is handled through a hybrid data management layer. Digital twin services, which consolidate data from various sources, are deployed on both edge and central cloud layers. The reliability of the PoDIUM platform data and applications will be evaluated to ensure data truthfulness and software integrity.
The PoDIUM platform architecture outlines the main enablers that will be developed and implemented by the project. The system features CCAM services operating on a central cloud and an edge layer. Road users, including vulnerable road users and emergency vehicles, can connect directly to the infrastructure or be detected by sensors equipped on other road users or by infrastructure sensors. To improve reliability and latency, multi-connectivity is ensured through wired, cellular, or ad hoc networks. The data from and for the edge and central layers is handled through a hybrid data management layer. Digital twin services, which consolidate data from various sources, are deployed on both edge and central cloud layers. The reliability of the PoDIUM platform data and applications will be evaluated to ensure data truthfulness and software integrity.
“It has been a remarkable first year for PoDIUM. We are thrilled to participate in this pioneering project and contribute towards achieving its goals, which are in alignment with our vision for Cooperative Connected and Automated Mobility,” says Dr Nikolaos Tsampieris, Senior Manager and ERTICO lead in the project.
In the upcoming months, the PoDIUM platform architecture will be deployed in the Living Labs, where pre-evaluation testing will take place. The solutions that will be developed in the Living Labs will be further defined and improved in 2024 for the demonstration of the use case towards the end of the project.
Visit the PoDIUM website for more information on the project and follow PoDIUM on LinkedIn and X (Twitter).







{kind=link}